Compute likelihood for the two-tap scenario with unequal spatial variance
likelihood_2Tap_UneqVar.RdThe function computes likelihood values for the given trajectory. The code refers to the two-tap model with equal variance (spatial uncertainty) for both taps as described in Goldreich & Tong (2013), given in Formula A17.
Arguments
- x1m
measured/sensed or hypothetical position of tap 1 for which the likelihood (p given the other parameters) is computed
- x2m
measured/sensed or hypothetical position of tap 2
- x1
(real) position of tap 1
- x2
(real) position of tap 1
- sigma_s1
spatial uncertainty (given as a standard deviation) for tap 1
- sigma_s2
spatial uncertainty (given as a standard deviation) for tap 2
Value
likelihood values (see article for details or the vignette on the two-tap scenario). If x1 and x2 are vectors, a vector of likelihood values is returned.
Examples
require(rabBITS)
#XXX Example 1: compute a single point estimate XXX
likelihood_2Tap_UneqVar(x1m=2, x2m=4, x1=1, x2=2, sigma_s1=1, sigma_s2=2)
#> [1] 0.1170997
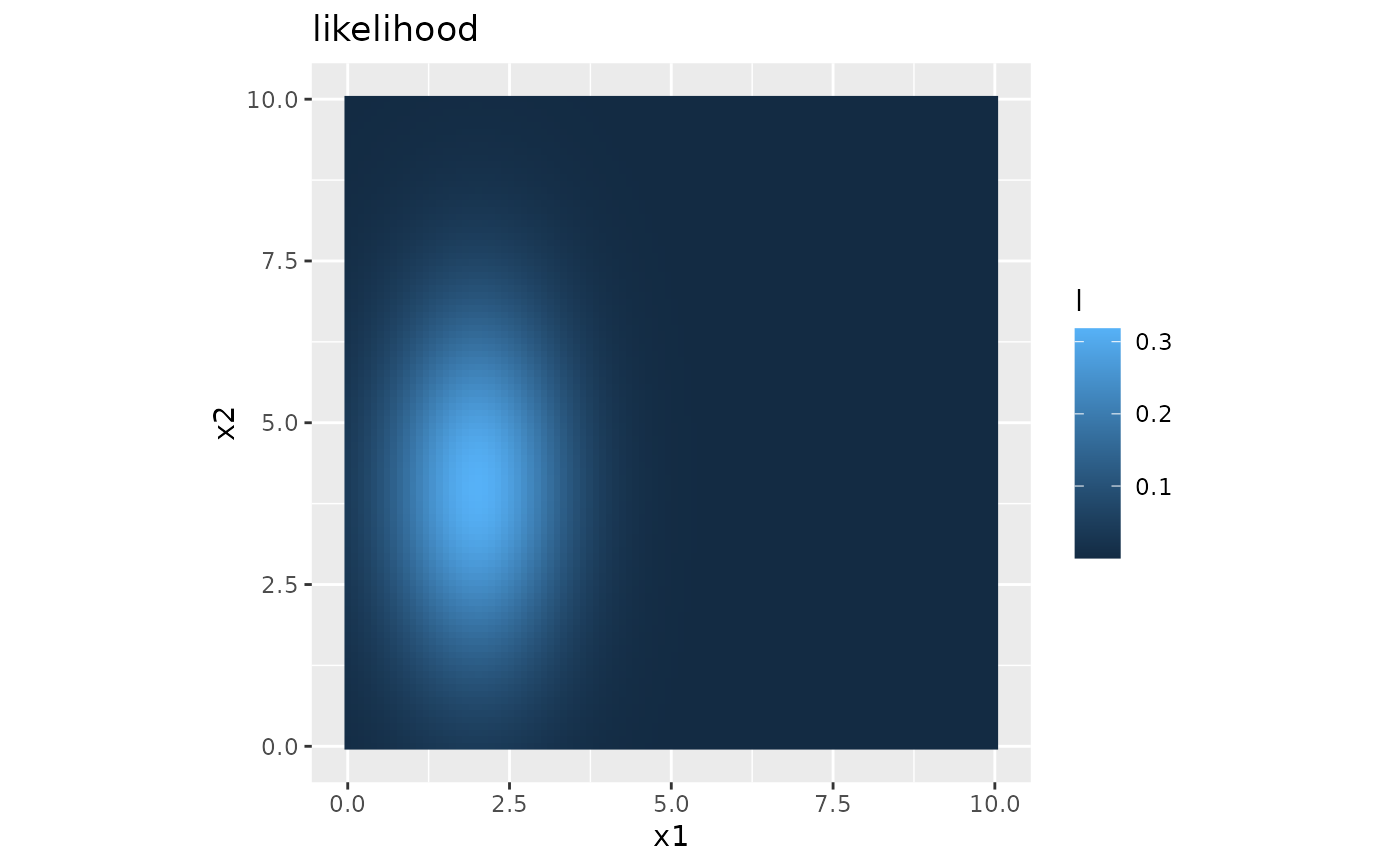
#XXX Example 2: plot likelihood function for combinations of tap 1 and 2 XXX
library(ggplot2)
x1_range <- c(0, 10) #range for taps
x2_range <- c(0, 10)
x1_res <- 100 #resolution for graphs
x2_res <- 100
likelihoodMat <- expand.grid(x1=seq(x1_range[1], x1_range[2], length.out=x1_res), x2=seq(x2_range[1], x2_range[2], length.out=x2_res))
likelihoodMat$l <- likelihood_2Tap_UneqVar(x1m=2, x2m=4, x1=likelihoodMat$x1, x2=likelihoodMat$x2, sigma_s1=1, sigma_s2=2)
ggplot(likelihoodMat, aes(x=x1, y=x2, fill=l)) +
geom_raster() +
coord_fixed() +
ggtitle("likelihood")